还在讨论远程问诊?远程机器人手术已提上议程
作者:allenxu
2015-12-20 08:00
{{detail.short_name}}
{{detail.main_page}}
{{detail.description}}
{{detail.round_name}}
{{detail.state_name}}
{{detail.province}}-{{detail.city}}
{{detail.setup_time}}
融资金额:{{detail.latest_event_amount}}{{detail.latest_amount_unit}}
投资方:
· {{item.latest_event_tzf_name}}
企业数据由

提供支持

从远程呈现到远程手术
也许很多人熟悉QQ视频聊天,足不出户便可与四方好友高谈阔论。但是,目前的视频聊天还很难给人们带来面对面近距离聊天的感觉。那么,有没有一种技术能给我们带来那种沉浸其中的感觉——分不出现实与虚拟,并且能在对方的场景中交流与操作呢?
在遥远的美国,有一名7岁的男孩戴文看上去和同龄的小朋友无异,但是,由于患有严重的过敏症,他必须呆在家里,不能像其他小朋友一样去学校上学。不过,戴文照样和能上学的孩子一样享受学校生活。目前,戴文可以登录这所学校里一个名叫VGo的机器人,通过它与同学和老师交谈。VGo机器人身高1.5米,身材苗条,“脸”是一个屏幕,独“眼”是一个摄像头,“脚”是两个轮子。它能以成人正常步行的速度前进,并拍下周围的情况传送给坐在电脑前的戴文。而小戴文使用的正是一种叫远程呈现的新技术。
所谓远程呈现,简单点说,就是一种虚拟存在,能够使人实时地以远程的方式在某处出场,即虚拟出场。此时,出场相当于“在场”,即你能够在现场之外实时地感知现场,并有效地进行某种操作。
这种想法至少可以追溯到20世纪80年代初。那时,机器人先锋之一的马文•明斯基创造了“Telepresence(远程呈现)”一词。他用这个词表示让一个人感觉好像出现在一个其真正所在地以外地方的一整套技术。虽然当时并没有完全如明斯基想象的那样变成现实,但这些技术在后互联网时代却得以飞速发展。
后来,随着远程呈现和遥感技术的发展,远程呈现系统开始允许人们移动和操纵物体。医院最先开始使用远程呈现技术,主要用于远程问诊以及远程手术,而后者就是我们本文的主题。

远程手术也是远程医疗的一部分,它是指医生运用远程医疗手段,异地、实时地对远端病人进行手术,包括远程手术会诊、手术观察、手术指导、手术等。说的简单点,就是医生根据传来的现场影像来进行手术操作,其一举一动可转化为数字信息传递至远程患者处,控制当地的医疗器械的动作。这一点乍想起来有些匪夷所思,可只要想想现在许多外科手术有不少都是通过内窥镜监视下操纵器械进行的这一事实,就不难理解了。它其实不过是把“内窥镜”与“器械”的长度变得更长了而已。当然,这种手术对相关技术的要求也是很高的,它结合了计算机技术、卫星通信技术、遥感、遥测和通信技术、全息摄影技术、电子技术等诸多高新技术,在allen看来,这已然代表了虚拟现实以及互联网通信在远程医学治疗方面的未来。
事实上,远程手术其实并不是一个新概念,远程医疗的概念早在1970年代就被人提出,1980年代,远程手术的概念被提出,在20世纪70年代的时候,当时美国航空航天局(NASA)就有技术专家开始研究使用机器人对宇航员进行远程手术的可能性了。从那时起,NASA就开始和军方合作稳步推进可实际执行远程手术的机器人项目了。后来随着远程呈现技术的发展,Mehran Anvari 为了进一步弄清楚远程机器手术是如何进行的, 它着手尝试了第一次机器人辅助远程手术,这次主要是帮助一位居住在宝瓶座(Aquarius )水下基地的战士缝合伤口。不过,缓慢的通信网络、有限的带宽以及落后的远程呈现技术阻碍了远程手术进一步深入发展。

“林德博格手术”
现在,如果你在美国,需要进行前列腺切除手术,就可以使用远程手术进行,即外科医生使用一个机器人操纵器来完成手术。目前,有90%的这种手术可以使用这种方式完成,手术刀已经可以被跨洋使用。但在20世纪初期的时候,这还是一个相当新潮的技术,说到这里,我们有必要介绍一个人-手术机器人之父王友伦。
2011年2月8日,美国国家工程学院公布 68 位新院士和 9 名外籍院士名单,王友仑名列其中,而他,正是手术机器人“ AESOP ”和“ZEUS”的发明者。

在20世纪80年代初,王院士从加州大学圣芭芭拉分校(UCSB)计算机工程专业本科兼研究生毕业,那时,他正好在为博士研究方向发愁。而当时王友仑父亲正在美国加州大学伯克利分校任教,就他回忆说,那时他曾很中国传统地问他的父亲,自己该选择哪一个专业方向去主攻。父亲沉吟良久,吐出四个字:工程技术。理由是,工程技术能把工程和知识结合在一起,能用科学为人类服务。加之他从小就十分迷恋机器人,并认为机器人是未来发展的方向,是计算机与物理世界进行交互的方式。因此,他顺理成章的开始了计算机工程(机器人方向)博士学位的攻读。
之后,他便开始研究二十世纪八九十年代的机器人市场。并获得 了NASA 的资助,在王院士和他医生朋友们的交谈学习中,他了解到了腹腔镜微创手术。
在 90 年代初,这个行业还处于起飞阶段。在微创手术中,医生通过内窥镜等设备在病人体内开展治疗,在电视屏幕上就可以看到病理构造,这项技术极大地提高了外科手术的成功率。微创手术成为计算机运动的主题,他在 1989 年开始研究“伊索”(AESOP,自动最优定位内窥镜系统),并于 1997 年研制成功、投入使用。
伊索配备了腹腔镜,后来,这个机器人就发展成了“宙斯”号手术机器人,宙斯是一个完整的手术器械机器人系统。紧接着,它就被用来进行了世界上第一台远程手术。2001 年 9 月 7 日,法国斯特拉斯堡的普外教授雅克•马里斯科克斯和美国纽约的著名外科医生米歇尔博士在两地协同合作,同时欧洲远程手术研究机构(EITS)也有从旁协助,他们一起为躺在斯特拉斯堡医院手术台上的女病人完成了这台闻名于世的“林德伯格手术”-切除胆囊手术,当时是法国提供特殊的电缆来减少延迟和优化连接,而美国方面也是computer motion提供的手术机器人,双方合作完成。
本来外科手术的瓶颈之一就是缺乏训练有素的外科医生,自从“林德伯格手术”成功之后,在当时的医疗手术界还真引起了一波不小的高潮。当时加拿大外科医生Mehran Anvari就使用手术机器人为其他地方的一些病人进行了超过20次远程手术,包括疝和腹部外科。Anvari将他的机器人放置在该国,而他,则在加拿大汉密尔顿的圣若瑟诊所的控制台上远程指挥。他的双手放在操纵台上,控制着机器人使用何种医疗器械,机器人摄像机就是他的眼睛,这样他能够随时和工作人员沟通以派发新的指令。
远程手术作为工程科学和医药科学的结合提供了很好的平台,也为许多生活在遥远和相对孤立地方的患者提供了希望。
那么,远程医疗中的远程手术究竟是如何实现的呢?
前面我们说到,基于医学物联网的远程手术,是计算机技术、通信技术与多媒体技术同医疗技术相结合的产物,它对基础设施相对要求较高,其主要包括如下几部分:
通信网络:高速宽带网络为远程手术提供信息传输的通道,通过网络将现场的音频、视频和监测设备的信号传送到异地手术医生的计算机设备中,供医生了解手术现场的实际情况。网络连接最好用DDN,点对点连接,可以最大限度的减少线路衰减。另外,各终端与现场的通话都应采用双工通话,与图像传输最好是采用双线路,这样才不会影响图像的传输质量
全景摄像机:具有变焦与自动聚焦功能,有摄像支持的手术设备系统与图像传播系统应兼容
手术信息系统:患者信息可以数字化存储,手术中的图像资料可以实况转播,还能够随时可以调出。现场的计算机要CPU处理速度快的,要装有医用的视频图像采集卡,最好是进口的,目前国内的还不过关,各地终端机的配置也要好,特别是显卡要好,显存要大
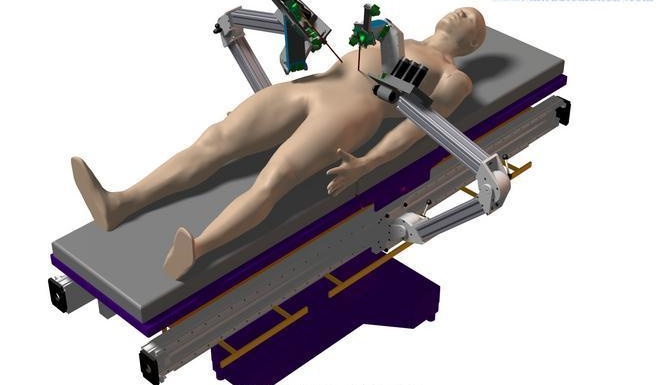
智能机械系统:远程手术的成功完成还需要一个受中心站点精确控制的智能机械系统,包括机器人、操纵杆或精密机械手。这种机械装置可以在远端站点的手术室内完全逼真地再现中心站点医生在虚拟现实环境中所进行的手术操作,使之准确地施加在与虚拟现实环境中完全相同的患者身体的部位。
一系列准备好了之后,我们是否就要开始进行远程手术了呢?当然没这么简单!
在手术之前,还需要进行远程会诊与手术规划,远程中心与远端站点的医生通过医学物联网对病人资料作出详细分析和研究,制定详细的手术方案,应用虚拟现实技术进行手术规划与预演,准备主要手术方案的可能替代方案。
最后的最后,手术彩排啊替代解决方案什么的准备妥当之后,我们要正式开始实施远程手术了,说起来还有点小激动~这时执刀医生位于中心站点,通过技术手段遥控位于异地远端站点的机器人来进行手术。远程手术在位于中心站点的虚拟手术室和远端站点实际手术室同时进行,前者的手术对象是由患者的信息数据再现的虚拟病人。应用虚拟现实技术及精密传感技术将远端患者的空间透视图像,患者的状态、姿态信息及重要的生理信息传送至控制中心并精确地显示于操作者(外科医生)的一个虚拟图像环境中。
当然随着虚拟现实的发展,外科医生现在是戴着fashion的虚拟现实头盔并且利用定制的界面对虚拟的患者部位进行虚拟手术操作。
到这里,如果不出意外,allen自己YY的远程手术应该是已经成功完成了。既然我们都拥有了实施远程手术的技术了,那为什么到现在它还没有大规模民用化呢?下面我们就要扒一扒阻碍远程手术实施的几大拦路虎~
远程力反馈
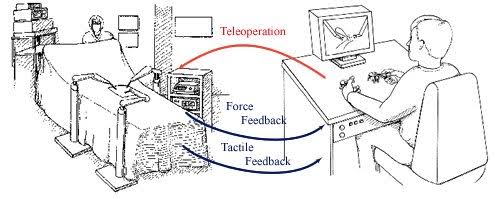
通常情况下传统的遥感操作系统中最重要的问题是保持系统的稳定性,而对于柔软组织来说,机器人和环境之间力反馈的真实性就显得格外重要。在手术中,由于地域隔离,外科医师 会失去力的感觉和操作体验,而这些是手术成功的必要条件。遥控操作系统就是为了恢复这些失去的能力而设计的。从遥控操作器到主操作器的直接力反馈能够增加操作的灵活度。与通常的遥感操作系统不同的是,远程手术要求非常高的灵活度和真实度。这是因为外科医生在很大程度上是依靠他们的运动力感觉来完成高精度的操作并检测隐藏的组织的。
高速通信

远程手术的优势是显而易见的,但与任何依赖于电信技术的工具一样,它的身上同时也存在着安全隐患。外科医生和机器人之间的通讯一般都是在公共网络上进行的,如果所在区域网络状况较差,通讯将会受到影响。
对于视频游戏者来说,延迟就是家常便饭一般,当他们移动控制器的时候,他们游戏中的虚拟形象总是会延迟一秒钟左右。虽然这种延迟在游戏中还尚可接受,但是在真实的手术中,这短短的一秒钟延迟极有可能会要了病人的命。
就以医生通过屏幕上的图像来抓取血管为例,如果他们并没有习惯这种时间延迟,他们可能会认为他们移动到了正确的距离,但是事实上医生的操作太快了,有可能会穿刺动脉或器官。
如果你是一个医生,且当你在做手术的时候发生了延迟,在你手术失败前,而且在延迟使得操作变得不再安全的情况下你能忍受到什么程度?
曾经有医院进行过远程手术模拟测试,发现有经验的外科医生可以在200毫秒的时间延迟范围内安全操作,且能够适应200到500毫秒之间的时间延迟。如果延迟时间大于500毫秒,则充满太多不确定因素。所以,另一方面,手术的成功也和医生有密切的关系。
医疗机器人黑客
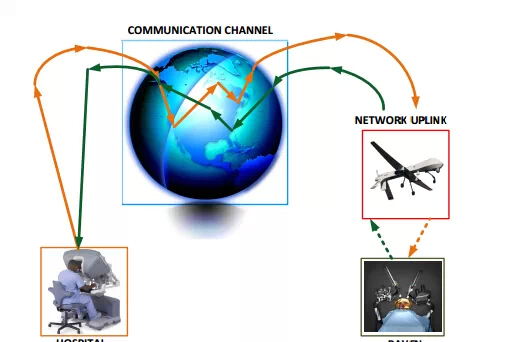
机器人本身则基于Linux这样的开源系统上的操控软件。它可以通过标准通信程序(如Interoperable Telesurgery Protocol)同远程控制面板连接。
这种链接基于公网,因此可能被任何人所访问,而机器人又是为极端环境设计的,因此网络链接的质量也可能会不佳,甚至会通过无线网络来连接。
这样就产生了风险。因为网络连接的不可控性,恶意入侵者可以轻而易举地阻塞、干扰甚至劫持手术机器人和外科手术之间的网络连接。
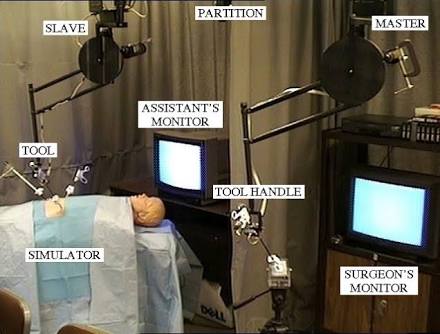
西雅图华盛顿大学的研究者们曾经模拟过一个恶意入侵者是如何干扰手术中机器人的行为的,他们使用的是拥有双机械臂的Raven II,并通过一部最先进的控制台——支持视频传输和触觉反馈——对其进行操作。该团队尝试过3种类型的攻击,分别是删除、延迟和打乱操作者的命令,改变控制信号的意图和完全控制机器人,并都轻松取得成功。
研究者还指出,机器人所拍摄到的视频图像是可公开获取的,任何人都可以实时看到这些画面。
如果能对机器人和控制台的通讯进行加密,许多攻击方式都能被阻止。但我们都知道,即便是最复杂的安全系统,黑客有的时候也能够找到其中的漏洞。至于何种程度的遥控手术安全是可以接受的,这显然需要医生、决策者和公众来做出艰难选择。想要避免外科手术变成现实版电锯惊魂,这个问题需要各方都立刻重视起来。
授权与责任
授权和责任仍然是当时远程手术面临的主要障碍之一,就以美国为例,由于美国医生营业执照是由各州颁发的,那么佛罗里达的外科医生能否给德克萨斯的病人进行远程手术呢?互联网在各州之间实现了互联,是否也意味着医生要拿到全美所有州的营业执照才能手术?
医疗纠纷
远程手术还可能引发医疗纠纷。如果远程手术加速了医疗行业的新浪潮,那么它立即会触发一系列的新问题。比如,这些服务应该在哪里发生?由谁来监督?如果医疗步骤中一些地方出错,或者一个无资质的医生进行了远程手术,应该由哪个法院进行调查,由哪家医院对此负责呢?确实,没有哪个国家有关于远程手术方面有制定过相关法规,对于允许医生跨越国界的手术行为,多数法律执行并无应对准备。
就业
除了技术上的一些问题,在现实生活中,远程手术的大规模应用可能严重影响就业。想象一下,一家公立医院如果使用大量使用机器人进行远程手术,它将停止雇用很多优秀外科医师,而转而提高了外科医生的选拔标准,一些不太优秀而通过各种渠道可以获得工作的外科医师就会面临失业的风险。
上述的这种情况已经在工业领域发生了,只是由于医学的门槛相比普通工业制造稍高,所以还存在着一定的缓冲期。不过,从技术和经济的角度来看,这些将必然发生。
美国麻省理工学院从事远程技术研究的马特•比恩指出,一个远程工人可以负责10个商店和30个机器人。早在2011年6月,富士康科技集团首席执行官郭台铭就宣布计划部署100万台机器人。据悉,富士康此前某产品线的员工数量为20~30人,但在他们增加了机器人之后,该产品线的工人数量立即下降到5人,这些普通员工只需控制按钮和运行机器即可。
费用
前面我们介绍达芬奇机器人的时候分析过, 在价格方面,达芬奇最新一代系统价格大概在2500 万左右。其中除了主机费用外,还包括税费、培训费、临床技术支持费等。如果将成本分摊到每台手术上,机器人手术的价格比传统手术的成本高出3万元左右。此外,依靠达芬奇机器人所做手术的费用,目前并未被纳入各国医保报销范围,导致远程手术的应用也有一定的限制。而以前报道的比如30英镑白内障远程手术主要是因为慈善机构的自助才得以完成,对于普通百姓来说,医保才是我们更需要关注的。

远程手术,还有多远
今年九月份的时候,佛罗里达州一家医院成功通过网络测试远程机器人手术可行性。
据悉,在该次测试中,手术医生与该医院距离1200多英里,利用网络遥控手术机器人,对模拟病人(不是真病人,而是虚拟患者模拟器)进行手术。随后,佛罗里达这家医院计划将距离拉得更远,让远在丹佛、加州甚至是罗马的医生远程操作手术机器人进行手术。
通过这些测试,他们确定,远程手术在美国境内是可行的。全美网络延迟性已经大大降低,不再是远程机器人手术限制因素。此外,在这次测试中,佛罗里达州医院使用的是达芬奇机器人手术系统,这是目前世界各地最常见的机器人手术设备
据以往的经验来看,一项技术能够为社会带来实际应用的前提是,军队已经将其开发完备,自己使用,并且证明其在军事环境下的价值。远程手术也许还没有大规模进入民用市场,但是其未来的应用非常令人期待。它可以连接城市里的医生和边远地地区的病人。如果我们想象得更科幻一些,你甚至可以为太空中的宇航员提供手术服务。
而由于我国人口众多,经济发展和医疗资源极不平衡,对于远程手术的需求更加强烈。相信随着十三五的开展以及医学物联网的发展,会有更多人享受到远程医疗所带来的便利。
如果您想对接动脉网所报道的企业,请填写表单,我们的工作人员将尽快为您服务。
注:文中如果涉及企业数据,均由受访者向分析师提供并确认。如果您有资源对接,联系报道项目,可以
点击链接填写基本信息,我们将尽快与您联系。
声明:动脉网所刊载内容之知识产权为动脉网及相关权利人专属所有或持有。转载请联系tg@vcbeat.net。